Demo #2: Final Demo of Working System Integrated Onto PCB
 Comments(0)
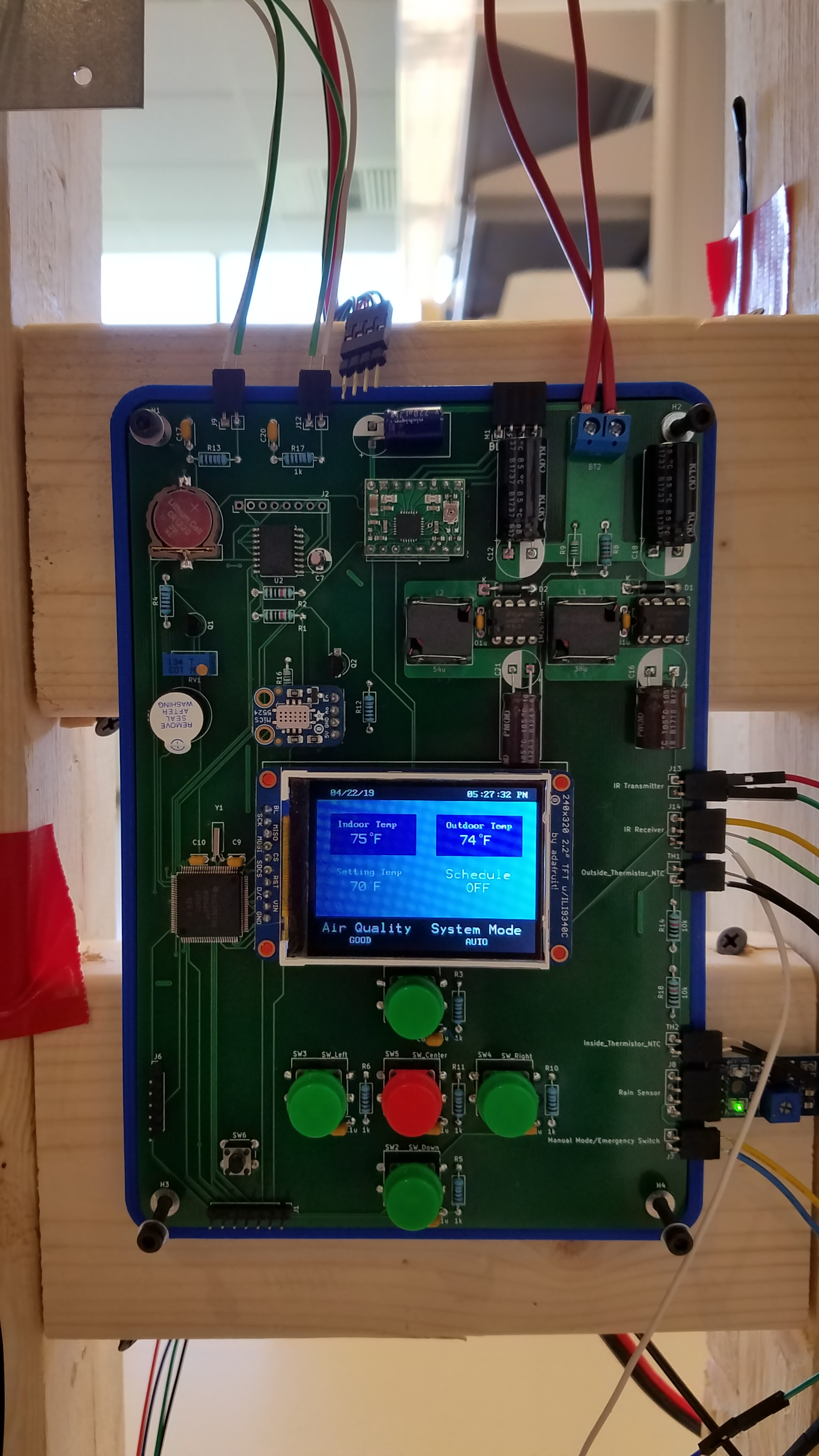
Comments(0) This is our second and likely final demo of our project working with the vast majority of its functionality. The biggest jump from the last demo was integrating our entire system’s components (MSP430, sensors, passive components, power regulation, etc.) onto a PCB. Here is a close-up of the PCB without the front cover of the case:
And here is a picture of the PCB with the front cover of the case:

In addition to integrating our system onto a PCB, we also were able to do the following major upgrades since the last demo:
- 3D printed a stiffer mount for the stepper motor and lighter handle to be used for manual operation.
- Successfully integrated sensor logic with our GUI and calendar system
- Mostly fixed the stepper motor stalling issue by decreasing acceleration to top speed (currently occasionally stalls, but that’s mainly due to the window starting to wear out from our repeated opening/closing, so it gets stuck from time to time).
The only feature remaining that we may or may not be able to finish before final presentation is the scheduling system/calendar. Presently you can navigate the calendar/scheduling system just fine, however the scheduled blackout periods don’t actually take effect in the back end of the software. If we are able to resolved this before final presentation, we will likely shoot another demo showing that feature, otherwise it will remain as an opportunity to expand the system in the future if desired.